材料試驗機(jī)是一種常用的力學(xué)試驗設(shè)備,用于測試各種材料的力學(xué)性能‘�����。隨著各行業(yè)對新材料的需求越來越廣泛����,材料的力學(xué)性能測試已成為關(guān)鍵。傳統(tǒng)試驗機(jī)只能靠試驗人員觀察��,根據(jù)經(jīng)驗加以手工調(diào)整�����,通過指針表盤的讀數(shù)計算得到材料性能數(shù)據(jù)����,操作復(fù)雜。按照現(xiàn)行的材料測試標(biāo)準(zhǔn),傳統(tǒng)試驗機(jī)無法達(dá)到要求��,也將逐漸被淘汰����。因此,本研究將基于Delphi語言的軟件技術(shù)與基于單片機(jī)的自動控制技術(shù)相結(jié)合��,應(yīng)用于材料試驗機(jī)的控制系統(tǒng)中�����,通過對通用材料拉伸���、壓縮等試驗標(biāo)準(zhǔn)進(jìn)行分析的基礎(chǔ)上��,建立試驗機(jī)測控系統(tǒng)軟硬件與試驗標(biāo)準(zhǔn)規(guī)程之間的關(guān)系��,提出模塊化的上�����、下位機(jī)軟件及硬件的設(shè)計方法�����。
本研究在建立測控系統(tǒng)上位機(jī)軟件及下位機(jī)軟�����、硬件平臺的基礎(chǔ)上對所提出的模塊化實驗設(shè)計方法進(jìn)行評價��,同時進(jìn)行多目標(biāo)持荷試驗��、水泥膠砂抗壓試驗以及金屬拉伸試驗�����,以期解決材料試驗機(jī)功能單一���、試驗擴(kuò)展復(fù)雜的缺點。
1 測控系統(tǒng)硬件設(shè)計
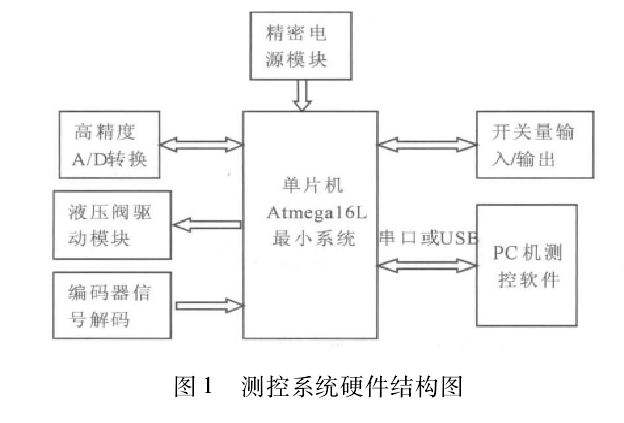
本研究以 AVR 單片機(jī)為核心����,基于硬件模塊化設(shè)計的思想,實現(xiàn)了測控系統(tǒng)的硬件結(jié)構(gòu)��,其主要包含 6個子模塊����,系統(tǒng)結(jié)構(gòu)如圖 1 所示�����。
1. 1 單片機(jī)最小系統(tǒng)
該系統(tǒng)采用 AVR 系列單片機(jī) Atmega16L�����,其最小系統(tǒng)由單片機(jī)��、電源�、晶振以及復(fù)位電路組成��。復(fù)位電路是在進(jìn)行系統(tǒng)硬件設(shè)計中常見的一種電路���,而一個系統(tǒng)復(fù)位電路設(shè)計的好壞��,直接影響到整個系統(tǒng)工作的可靠性�����。故該系統(tǒng)復(fù)位電路根據(jù) AVR 單片機(jī)的低電平復(fù)位特點��,直接由 10 kΩ 上拉電阻實現(xiàn)�����,簡單可靠�。晶振電路采用陶瓷晶體與雙 30 p F 電容組成,頻率 8 MHz�。
1. 2 高精度 A / D 轉(zhuǎn)換模塊
該模塊采集壓力、變形等模擬信號�����,經(jīng)濾波放大后輸入 A/D 轉(zhuǎn)換器�����,轉(zhuǎn)換成數(shù)據(jù)信號�,傳遞給單片機(jī)��。
放大器采用 OP07��,A/D 采用 AD7710�����,均為模擬器件公司的高精度器件�。
1. 3 拉線編碼器解碼模塊
拉線編碼器用于測試工作臺位移,包括方向解碼和位解碼��,方向解碼采用 74LS74,編碼器的 A����、B 相信號,經(jīng)過光電耦合器隔離進(jìn)入方向解碼和單片機(jī)���,方向信號也輸入單片機(jī)�,通過單片機(jī)進(jìn)行計數(shù)和位移計算���。
1. 4 精密電源模塊
電源模塊給所有 IC 供電�����,其中最關(guān)鍵的是給AD7710 提供精密電壓源��,精密電壓源由 LM336 提供�。
1. 5 串口通訊模塊
串口通訊實現(xiàn)下位機(jī)與上位機(jī)的數(shù)據(jù)通訊���,下位機(jī)將采集到的信號傳遞給上位機(jī)�,上位機(jī)則下發(fā)命令告訴下位機(jī)該執(zhí)行的動作��。在本研究中���,通訊芯片采用 MAX232�。
1. 6 開關(guān)量輸出模塊
開關(guān)量的作用包括兩部分: ①實現(xiàn)對步進(jìn)電機(jī)方向和脈沖輸出控制; ②輸出實現(xiàn)系統(tǒng)的過載保護(hù)。
2 軟件設(shè)計
2. 1 上位機(jī)設(shè)計
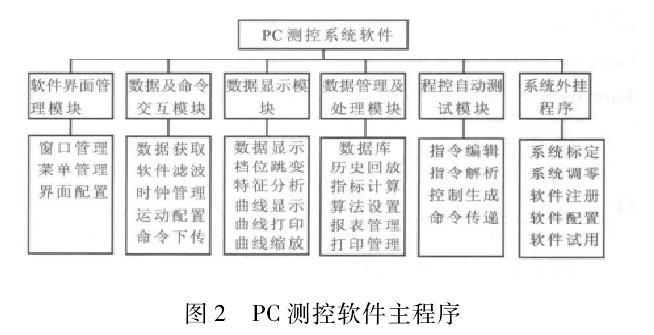
目前試驗機(jī)測控軟件操作復(fù)雜�����,對實驗員水平要求高��。本研究通過軟件架構(gòu)的調(diào)整來解決這個問題�。軟件分成 3 大塊: 主程序�����、設(shè)備配置模塊和試驗?zāi)K���,后兩者均以 DLL 形式封裝�,前者用于支持不同機(jī)型�����,后者便于擴(kuò)展新的試驗方法����。動態(tài)鏈接庫( Dy-namic Link Library��,DLL) ��,它是一種函數(shù)或資源庫��,可以編寫成與語言無關(guān)的方式�,被應(yīng)用程序或其他 DLL文件調(diào)用���。所以主程序支持在不同試驗?zāi)K間的切換����,當(dāng)實驗員切換到某個預(yù)置的試驗?zāi)K����,與該試驗相關(guān)的控制過程、數(shù)據(jù)記錄和結(jié)果分析方法都被完全定制��,把實驗員從專業(yè)�、繁瑣的參數(shù)設(shè)置中解脫出來。
主程序?qū)⒐芾聿⒊尸F(xiàn)另外兩個模塊的信息�����,主程序結(jié)構(gòu)如圖 2 所示。
2. 2 下位機(jī)軟件設(shè)計
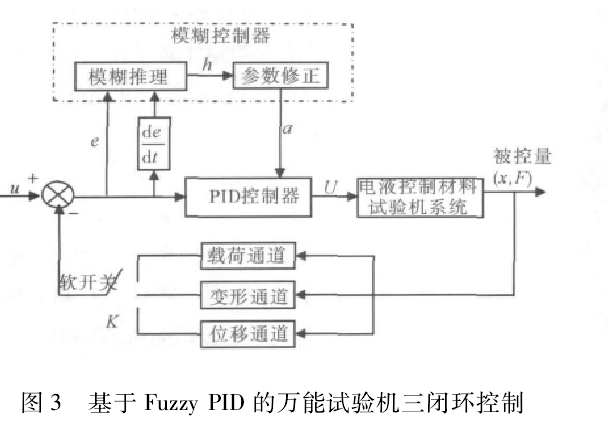
下位機(jī)軟件由數(shù)據(jù)采集程序��、壓力控制程序����、通訊程序組成。數(shù)據(jù)采集程序?qū)崿F(xiàn)單片機(jī)與 AD7710 的通訊�����,壓力控制程序?qū)崿F(xiàn)試驗機(jī)加載控制�,通訊程序?qū)崿F(xiàn)上、下位機(jī)的數(shù)據(jù)交互及命令解析���。在壓力控制程序方面,采用單一經(jīng)典的 PID 控制策略�,往往不能達(dá)到理想的控制效果; 采用單一模糊控制策略,雖然改善了動態(tài)特性和魯棒性�,但由于大量模糊控制規(guī)則的存在,影響了控制的準(zhǔn)確性��。其中壓力控制程序?qū)崿F(xiàn)基于模糊 PID 的三閉環(huán)控制如圖 3 所示��。
本研究采用自行開發(fā)的材料試驗機(jī)控制器對某公司生產(chǎn)的手動試驗機(jī)進(jìn)行改造��,改造完成后的試驗臺如圖 4 所示,可進(jìn)行標(biāo)準(zhǔn)的材料性能測試相關(guān)試驗����。
3. 1 多目標(biāo)持荷試驗
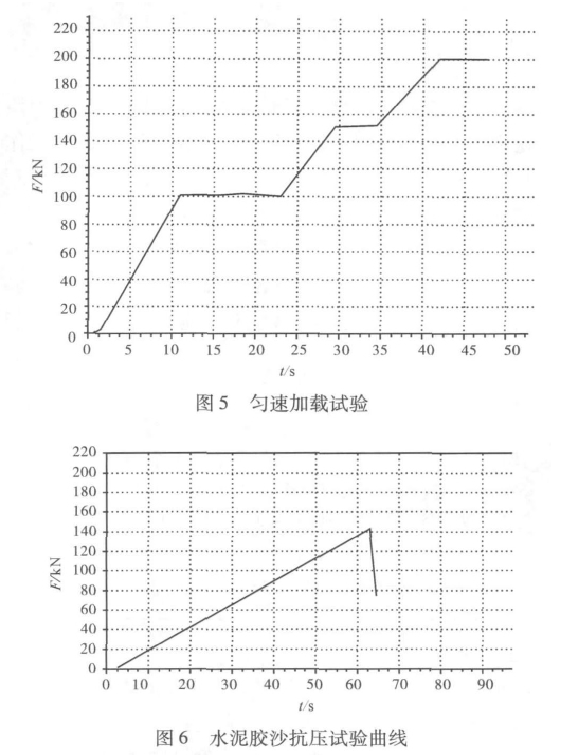
多目標(biāo)持荷試驗的目的是測試該算法在勻速加載和目標(biāo)持荷時的效果,以驗證測試控制系統(tǒng)的基本性能��。采用 Fuzzy PID 算法控制器的實驗效果如圖 5 所示���。從圖 5 中的實驗曲線看���,該算法達(dá)到了一級精度要求。
3. 2 水泥膠沙抗壓試驗
本研究在加載持荷實驗基礎(chǔ)上���,進(jìn)行水泥膠沙抗壓試驗�����,試驗記錄的力-時間曲線如圖 6 所示�����。試驗加載 速 度 能 夠 精 確 地 控 制 在 試 驗 標(biāo) 準(zhǔn) 所 要 求 的2. 4 k N / s����,證明了該算法及其控制器在精確力控制中的效果。
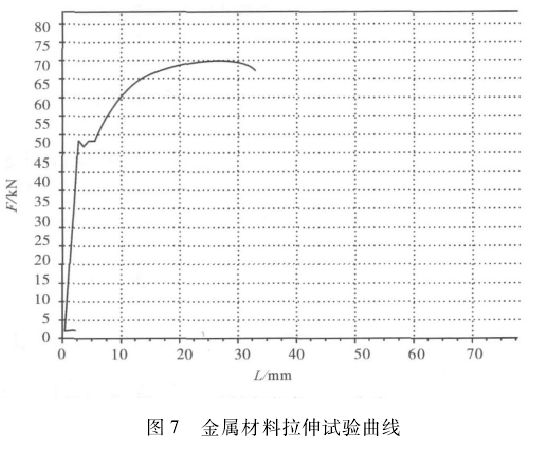
3. 3 具有明顯屈服的金屬材料拉伸試驗
在前述試驗的基礎(chǔ)上��,本研究對具有明顯屈服材料進(jìn)行拉伸試驗�。試驗過程中采用力、變形�、位移三閉環(huán)控制,所得力 - 變形曲線如圖 7 所示�。從試驗數(shù)據(jù)計算得到的材料力學(xué)性能與該材料的理論力學(xué)性能基本吻合,反映了自適應(yīng) PID 算法在三閉環(huán)金屬拉伸試驗中的適用性���。
4 結(jié)束語
本研究自主開發(fā)的材料試驗機(jī)控制系統(tǒng)采用模塊化設(shè)計思想����,在軟件和硬件兩個層面實現(xiàn)了設(shè)計����、操作及擴(kuò)展的方便性,降低了試驗員的工作強(qiáng)度�,使集成新的材料試驗標(biāo)準(zhǔn)也變得簡單��。
通過對多種材料及不同實驗標(biāo)準(zhǔn)的集成及其實驗表明����,該系統(tǒng)在實現(xiàn)國家標(biāo)準(zhǔn)及操作簡便性的同時,能便于試驗擴(kuò)展,且達(dá)到了較高的數(shù)據(jù)精度及系統(tǒng)控制精度�。








 來源:天氏庫力 發(fā)布日期
2020-09-16 瀏覽:
來源:天氏庫力 發(fā)布日期
2020-09-16 瀏覽: